青岛地铁智能巡检机器人研发项目获山东省科研立项,引领轨道交通运维新变革
以“青岛地铁线路智能巡检机器人研究”为核心的项目成功获得山东省科研立项,标志着山东省在轨道交通智能化运维领域迈出了坚实一步。该项目聚焦于智能机器人的研发与应用,旨在通过技术创新提升地铁线路巡检的效率、精度与安全性,为城市轨道交通的稳定运行与高质量发展注入新动能。
当前,地铁作为城市公共交通的主动脉,其线路设施的安全巡检是保障运营安全的重中之重。传统人工巡检模式存在劳动强度大、检测效率低、环境适应性有限、数据记录与分析主观性强等挑战,尤其在隧道、高架等复杂环境下,人员安全也面临一定风险。智能巡检机器人的研发正是为了系统性地解决这些问题。
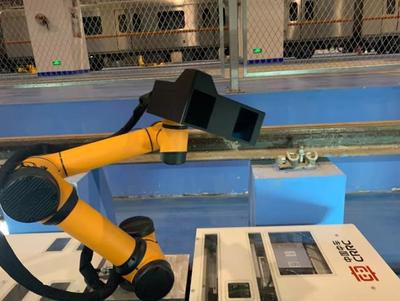
本项目研发的智能巡检机器人,预计将集成多种先进技术。在感知层面,机器人将搭载高清视觉传感器、红外热成像仪、激光雷达、超声波探测设备及多轴惯性测量单元,实现对轨道几何参数、接触网状态、隧道衬砌表观病害(如裂缝、渗漏)、异物入侵以及关键设备温度异常的全面、精准、非接触式检测。在决策与执行层面,依托人工智能算法,特别是计算机视觉与深度学习模型,机器人能够对采集的海量数据进行实时分析与智能诊断,自动识别缺陷类型、评估严重等级并生成标准化报告,极大提升了故障预警的及时性与准确性。机器人具备自主导航与避障能力,可适应地铁隧道内GPS信号缺失的环境,实现按预设路径或自主规划路径的稳定行走与作业。
该项目的成功立项,具有多重重要意义。在技术层面,它将推动机器人学、传感器融合、人工智能与轨道交通工程技术的深度交叉,催生具有自主知识产权的核心技术与装备。在经济与社会效益层面,智能巡检机器人的应用将大幅降低人工成本与安全风险,实现巡检工作的标准化与数字化,延长设备寿命,预防重大安全事故,保障市民出行安全与线路运营效率,其示范效应还可辐射至全国轨道交通乃至其他基础设施巡检领域。它契合山东省及国家关于推动制造业智能化升级、发展新质生产力的战略方向,是“智慧交通”建设的重要组成部分。
随着项目的深入推进与成果落地,青岛地铁有望率先建立起“天(无人机)-地(机器人)-人”协同的立体化智能巡检体系。智能机器人将不仅仅是替代重复性劳动的工具,更将成为集数据采集、智能分析、预测性维护于一体的综合运维平台节点,其产生的精准数据资产还将为地铁线路的全生命周期管理、养护决策优化提供强大数据支撑。
此次“青岛地铁线路智能巡检机器人研究”项目获得省级科研立项,是一个崭新的起点。它预示着以智能机器人为代表的先进技术,正深度融入城市基础设施运维的肌理,为构建更安全、高效、智慧的现代化轨道交通系统描绘出清晰的技术蓝图,也为山东省乃至全国的科技创新与产业升级提供了又一实践范例。
如若转载,请注明出处:http://www.1878070.com/product/50.html
更新时间:2026-02-24 12:49:13